¿Qué es la hidroponía?
La hidroponía se deriva del griego hydro (agua) y ponos (labor de trabajo), lo cual significa trabajo en agua. Por lo tanto, la hidroponía es un sistema de producción en el cual las raíces de las plantas no se encuentran establecidas en el suelo, sino en un sustrato o en la misma solución nutritiva utilizada. En la solución nutritiva, como su nombre dice, se encuentran disueltos los elementos necesarios para el crecimiento de la planta. Historia de la hidroponía La hidroponía, se ha desarrollado con una mayor velocidad a partir de experimentos para determinar los elementos que intervienen en el crecimiento de las plantas. Los primeros trabajos formales sobre este sistema de producción comenzaron en fechas cercanas al año 1600. No obstante, el crecimiento de las plantas sin suelo es conocido desde la antigua babilonia, en los famosos jardines colgantes, los cuales se alimentaban del agua que corría por medio de canales. Asimismo, hace más de 1000 años ya se practicaba la hidroponía en China, India y Egipto (orillas del rio Nilo), misma que se realizaba mediante esquemas rústicos. Figura 1. Cultivo de fresa en un sistema hidropónico re-circulante.
En México, los orígenes de la hidroponía son los jardines flotantes de los aztecas, llamados chinampas. Las chinampas eran construidas con cañas y bejucos que flotaban en el lago Tenochtitlán (México), además de ser rellenadas con lodo extraído del mismo. Posteriormente en 1860 los alemanes Sachs y Knop fueron los primeros en hacer crecer las plantas en una solución nutritiva, llamándolo al proceso nutricultura. En 1938 W.F. Gericke, profesor de la Universidad de California, logró establecer con éxito unidades de cultivo sin tierra de manera comercial, bautizando a este sistema productivo como hidroponía y es considerado el padre de esta moderna técnica de cultivo. Posteriormente la hidroponía comercial se extiende a través del mundo en la década de los 50´s. Perspectivas y futuro de la hidroponía La hidroponía, ha sido muy usada para la investigación en el campo de la nutrición mineral de las plantas, además de ser hoy en día el método de producción hortícola más intensivo. Generalmente este sistema de producción es de alta tecnología, con una fuerte inversión de capital, por lo cual es aplicada exitosamente en países desarrollados.
Entre los sistemas existentes que destacan en la hidroponía están los sistemas de recirculación NFT (Técnica de la Película de Nutriente) y NGS (Nuevo Sistema de Crecimiento) y los sistemas donde el medio de cultivo es un sustrato. Los cultivos hidropónicos más rentables bajo estos sistemas hidropónicos son tomate, pepino, pimiento, lechuga, fresa y flores de corte.
Métodos hidropónicos El cultivo en agua por definición es el auténtico cultivo hidropónico, aunque bajo el concepto descrito para hidroponía se contemplan otros sistemas. De acuerdo a lo anterior, dependiendo del medio utilizado para el desarrollo de las raíces, los sistemas de cultivo sin suelo se pueden clasificar en tres grupos:
1) cultivos en agua (con solución nutritiva);
2) cultivos en aire (aeropónicos) y
3) cultivos en sustrato con solución nutritiva Sistemas de producción en solución nutritiva
En este sistema se sumerge el sistema radical de las plantas en una solución nutritiva, la cual contiene los elementos nutritivos necesarios para su crecimiento. Dentro de los cultivos en solución nutritiva, se tienen distintos sistemas como se describen a continuación: -Sistema NFT. Esta técnica consiste en crear una película re-circulante de solución nutritiva dentro de tubos de PVC, lo cuales en sus extremos tienen tapas con pequeñas conexiones al final y al inicio para hacer recorrer el agua en todo el conjunto de tuberías que componen al sistema mediante una bomba, que se encuentra en el deposito donde se almacena la solución nutritiva. Los tubos de PVC tienen orificios en la parte superior, donde se colocan las plantas en cilindros de foami agrícola para NFT de tal manera que las raíces están en contacto con la película re-circulante de la solución nutritiva. -Raíz flotante.
Este método utiliza un medio líquido para el crecimiento de los cultivos. En este sistema las raíces flotan dentro una solución nutritiva, pero las plantas están sostenidas sobre una lámina ligera (la cual generalmente es de unicel), que se sostiene sobre la superficie del medio líquido. Figura 2. Sistemas hidropónicos: a) NFT; b) raíz flotante y c) NGS. Foto: Intagri. Figura 3. Cultivo aeropónico. Foto: Virgen, 2016. -Sistema NGS. En este sistema las raíces se desarrollan en una solución nutritiva re-circulante, distribuyendo agua, nutrientes y oxígeno de manera eficiente. Dicho sistema cuenta con distintas capas de polietileno en su interior, dispuestas de manera tal que la solución se va distribuyendo en ellas en forma de cascada. Dentro de estas mismas capas, las raíces van explorando sin restricción alguna hasta un agujero que les permite descender a las capas inferiores de la bolsa de polietileno, esto permite que el sistema se adapte a distintos cultivos. Sistemas de producción expuestos al aire -Cultivos aeropónicos. Este sistema consiste en colocar un cilindro de PVC u otros materiales en posición vertical, con perforaciones en las paredes laterales por donde se introducen las plantas al momento de realizar el transplante. Las raíces crecen en la oscuridad y pasan la mayor parte del tiempo expuestas al aire. Por el interior del cilindro, una tubería distribuye de manera periódica la solución nutritiva a las raíces mediante pulverización a mediana o baja presión.
Las plantas crecen bien en aeroponía debido a la excelente aireación de las raíces, dado que la concentración de oxígeno en el aire es 20 veces más elevada en relación a la concentración que existe disuelto en el agua. Sistemas de producción en sustrato El sustrato es un material sólido (natural o de síntesis) distinto del suelo que, colocado en un contenedor o bolsa, en forma pura o mezcla, permite el desarrollo del sistema radical, el crecimiento del cultivo y pueden intervenir o no en la nutrición de la planta. El sustrato brinda sostén y anclaje a la planta, además de mantener la humedad, drenaje, aireación y facilidad en la absorción de nutrientes para que la planta no tenga ningún problema en su desarrollo. -Sustratos más comunes en horticultura y sus características. Los sustratos que más comúnmente se utilizan en los sistemas de cultivo sin suelo son los siguientes: arena, perlita, lana de roca, turbas, fibra de coco y tezontle.
En el Cuadro 1 se presentan algunas características físicas generales de los seis sustratos. Cuadro 1. Propiedades físicas de varios sustratos utilizados en la horticultura. Fuente: Castellanos, 2009. Propiedad Turba rubia Lana de roca Perlita B-12 Fibra de coco Tezontle 1 Tezontle 2 DA (%)* 0.07 0.07 0.14 0.09 0.70 0.68 EPT (% vol) 96 97 86 94 72 71 CA (% vol) 41 36 29 30 35 32 AFD (% vol) 25 59 25 25 21 23 AR (% vol) 6.0 0.3 7.0 8.1 5.5 3.5 *DA (densidad aparente); EPT (espacio poroso total); CA (capacidad de aireación); AFD (agua fácilmente disponible); AR (agua de reserva). -Elección del sustrato. La elección de un sustrato se realiza con base en sus propiedades físicas, químicas y biológicas. Asimismo, se debe hacer una evaluación en los costos de adquisición y la rentabilidad que representan para la explotación.
Otros puntos menos decisivos pero importantes son: Disponibilidad y homogeneidad Disponibilidad de transporte y vías de comunicación Finalidad de la producción Impacto ambiental. Principales grupos de suelos de México.
Factores importantes de la hidroponía Solución nutritiva Una solución nutritiva es una mezcla de elementos nutritivos en solución, a una concentración y relaciones elementales, de tal forma que favorecen la absorción nutrimental por el cultivo. En una solución nutritiva se encuentran prácticamente todos los nutrientes considerados esenciales para las plantas, de tal manera que los cultivos no tienen ninguna restricción en su desarrollo, permitiendo obtener altos potenciales de rendimiento. Steiner (1980), propuso las proporciones de cationes y aniones que se deben tener teóricamente en una solución nutritiva (Cuadro 2).
El pH en sustrato y/o solución nutritiva Bajo condiciones de cultivo intensivo se recomienda mantener el pH del sustrato y/o solución nutritiva dentro de un intervalo reducido. El pH óptimo para plantas ornamentales en contenedor es de 5.2 a 6.3, mientras que en hortalizas es de 5.5 a 6.8. La mayoría de los nutrientes mantienen su máximo nivel de asimilación con pH 5.5 a 6.5. Por otro lado, un pH por debajo de 5.0 puede provocar deficiencias de N, K, Ca, Mg, B principalmente, y por encima de 6.5 puede disminuir la asimilación de P, Fe, Mn, B, Zn y Cu. Cuadro 2. Relaciones de concentraciones (meq/L) para aniones y cationes. Fuente: Steiner, 1980. NO3- H2PO4- SO4= 60% 5% 35% Ca ++ K+ Mg++ 45% 35% 20% Conductividad eléctrica La conductividad eléctrica (CE) indica el contenido de sales de la solución nutritiva, por lo que a mayor CE mayor es el contenido de sales.
La conductividad eléctrica está referida en decisiemens por metro (dS/m) y en hidroponía dependerá del cultivo establecido. A excepción de algunas especialidades, los valores de este parámetro generalmente están entre 1 a 2 dS/m
viernes, 13 de julio de 2018
viernes, 22 de junio de 2018
Uso Del Robot En La Agricultura
El uso de robots en tareas agrícolas
Los robots son comúnmente utilizados en la manufactura de productos de alimentación, pero aún son poco frecuentes en el campo abierto o en los invernaderos, contribuyendo en el ciclo productivo agrícola. Sin embargo, la tecnología robótica aplicada al sector agrícola se encuentra en un estado de desarrollo avanzado, con algunas realizaciones ya plenamente comerciales y otras validadas a nivel de prototipo. La inminente necesidad de aumentar la producción sin aumentar los recursos y minimizando el impacto ambiental, demanda, tal vez de manera inexorable, dar el paso de la mecanización a la automatización de la agricultura, en donde la robótica agrícola tendrá un protagonismo destacado.
La automatización en general y la robótica en particular son tecnologías sólidamente establecidas en los sectores manufactureros, incluido la alimentación, donde aspectos como la higiene, la reducción de los costes de producción o el aumento de la productividad, entre otros, pueden verse beneficiados con el uso de robots que realizan de manera eficiente tareas de pick & place, empaquetado, clasificación etc.
Así, los datos recogidos por la Asociación Española de Robótica y Automatización [1] muestran que en el año 2014 el 17,7% de los robots industriales operativos en España, estaban dedicados al sector de alimentación y bebidas, porcentaje sólo superado por el sector automóvil con un 31,6% [2].
Pero si bien la robótica dedicada a la manufactura, denominada ‘robótica industrial’, es una tecnología altamente implantada desde los años 70, la denominada ‘robótica de servicios’ en la que se trabaja de manera intensa desde la década de los 80, tiene todavía muchas dificultades por resolver. Este tipo de robótica se caracteriza fundamentalmente por su objetivo que, en lugar de priorizar al aumento de la producción, se enfoca en ayudar o substituir al humano en el desarrollo de actividades donde existen riesgos o limitaciones físicas.
Casos paradigmáticos de la robótica de servicios en la actualidad pueden encontrarse en los robots quirúrgicos, donde ayudan a cirujanos en operaciones mínimamente invasivas o en los robots de exploración planetaria, donde los robots permiten la toma de datos en lugares donde, por las condiciones ambientales y la distancia, se hace en la práctica inviable la intervención directa de las personas.
Dentro de los robots de servicio, se incluyen los robots agrícolas, tanto para realizar labores en agricultura al aire libre como bajo cubierta, dándose en ambos casos, en mayor o menor grado, las dificultades asociadas a los entornos no estructurados y a la necesidad de compartir espacio con los trabajadores.
Si bien las investigaciones aplicadas sobre los robots agrícolas comenzaron hace mas de 25 años, ha sido recientemente cuando el desarrollo de diferentes ‘tecnologías facilitadoras’ asociadas a las TIC (Tecnologías de la Información y comunicaciones) ha permitido un progreso sustancial en sus desarrollos, consiguiendo en los últimos años que, de acuerdo a los datos recogidos por la International Federation of Robotics (www.ifr.org), las aplicaciones de la robótica en agricultura y ganadería sean las segundas en número de ventas de robots de servicios profesionales, tras las aplicaciones en defensa y seguridad.
¿Son necesarios los Robots Agrícolas?
¿Qué razones pueden justificar esta destacada posición de la robótica agrícola dentro de los robots de servicio? ¿Está justificada la robotización de la agricultura?
La reciente Expo Milano 2015 tuvo por lema ‘Feeding the Planet, Energy for Life’ (Alimentar el planeta, energía para la vida). En ella se recordó de nuevo la necesidad de aumentar la producción agrícola en un 60 o 70% antes del 2050 [3]. Sin embargo, los recursos naturales disponibles (suelo cultivable, agua, energía) se encuentran muy cerca de su límite. Por ello, se hace imprescindible, que a la vez que se aprovecha de la mejor manera posible lo producido, evitando su desperdicio, se mejore el rendimiento de los recursos, considerando éstos de manera integral.
La mecanización de la agricultura en el siglo XIX y la introducción del motor de combustión en el siglo XX, permitieron un aumento singular de la producción agrícola [4], a pesar de la fuerte disminución de la mano de obra dedicada a la agricultura [5], que ha tenido un fuerte declive, sobre todo durante la segunda mitad del siglo XX. No obstante, este aumento de la producción se ha realizado, en muchas ocasiones, con un notable derroche de los recursos, que no es sostenible en el tiempo.
El ciclo de control.
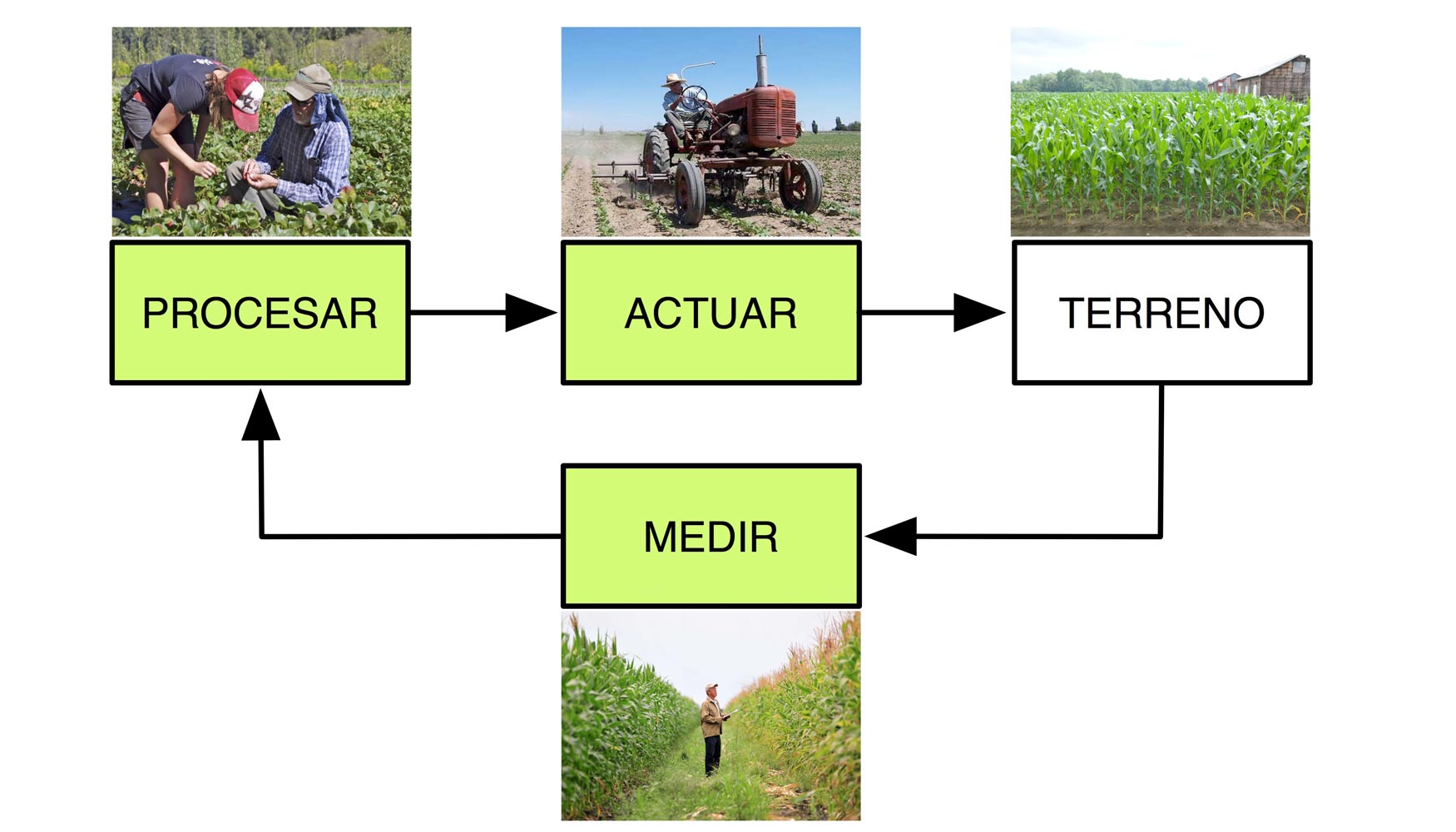
La denominada Agricultura de Precisión contribuye específicamente a optimizar el uso de los recursos e insumos. Su filosofía se sintetiza en utilizar el recurso adecuado en el lugar y momento preciso, evitando de este modo aplicar, por ejemplo, un riego o producto fitosanitario en una dosis excesiva o en un lugar innecesario. Para ello utiliza una metodología similar a la utilizada frecuentemente por los seres vivos y que, a su vez, inspira el funcionamiento de los sistemas automáticos de control industrial: Medir, Procesar la información y Actuar, reiterando este proceso de manera continua, para así conseguir que los resultados se acerquen a los objetivos.
La eficacia de este modo de funcionamiento precisa conocer con detalle espacial y temporal las necesidades de los cultivos y poder actuar con la misma resolución espacio temporal de manera adecuada. Estas funciones, que a pequeña escala pueden ser realizadas de manera manual, precisan de sistemas automáticos para poder ser proyectadas a las escalas de producción que la demanda precisa. Es aquí donde los robots agrícolas, entendidos como maquinaria con capacidad de desenvolverse en el entorno agrícola para capturar información o actuar sobre el terreno de manera autónoma o semiautónoma, encuentran su justificación.
Retos tecnológicos en la robótica agrícola
La robótica agrícola está, a día de hoy, en fase de prototipo avanzado, en lo que se viene a denominar nivel 7 de madurez tecnológica [6], lo que equivale a capacidad de demostración de sistema o prototipo en un entorno real, por lo que, salvo algunas excepciones, aún no alcanza la madurez necesaria como para abordar su implantación real y extendida en el sector. Además de motivos económicos, que enfrentan el alto coste de parte de la tecnología utilizada con los costes de la mano de obra dedicada a las actividades agrícola, las dificultades tecnológicas derivadas principalmente de la falta de estructuración del entorno de trabajo, suponen un complejo reto a superar. A continuación se revisan algunas de las tecnologías críticas en el desarrollo de la robótica agrícola.
Sistemas de Navegación: Puesto que se trata medir o actuar sobre localizaciones precisas, la primera necesidad a ser cubierta por un robot que se mueve en un entorno agrícola es la de navegación. Aquí es significativamente diferente la tecnología a utilizar en el caso de agricultura de interiores o exteriores. Así, en el caso de robots para invernadero, puede contemplarse desde el uso de robots que se desplazan por railes, facilitando enormemente su localización, hasta la inclusión de marcas o balizas en el entorno (ópticas, RFID, etc.), que pueden simplificar la tareas de localización del robot. Por el contrario, no se puede considerar el uso de los sistemas de navegación por satélite, como el conocido GPS, o el futuro sistema Galileo, que si puede formar parte destacable, pero normalmente insuficiente por si sola, del sistema de navegación de los robots agrícolas de exteriores.
En ambos casos la navegación del robot suele verse apoyada por sistemas de medida inercial (IMU) y por sistemas de telemetría que, con los correspondientes algoritmos, consiguen precisiones suficientes para el posicionamiento del robot. Toda esta tecnología está implantada en otros sectores y en fuerte proceso de mejora y crecimiento.
Sistemas de Visión por Computador: La visión por computador 2D y 3D, tanto en espectro visible como en otros espectros, constituye un pilar fundamental en el uso de robots en agricultura, tanto para las tareas de captura de información que, adecuadamente procesada, permite la toma de decisiones (estado vegetativo, necesidades hídricas o de nutrientes, presencia de plagas, etc.), como para ser usado como instrumento de ayuda al posicionamiento que permite ubicar la posición relativa entre el robot y el entorno sobre el que debe actuar (cosechado, localización de maleza, seguimiento de línea de cultivo, etc.). Las oclusiones entre los objetos sobre los que actuar, como por ejemplo frutos dentro de la masa foliar, la falta de homogeneidad y por ello difícil clasificación de los objetos presentes en la imagen y la variabilidad de las condiciones de iluminación, suponen una notable dificultad que limita aún las posibilidades de los robots tanto en exteriores como en interiores.

Procesamiento de imagen de frutos. CROpS. EU FP7 Project. Fuente: (http://www.crops-robots.eu).
Plataformas: Mientras que en el caso de robots de interiores las plataformas que transportan y posicionan los sistemas de medida o actuación son similares a las utilizadas en otras aplicaciones (transporte en almacén, vigilancia etc.) en el caso de robots de exteriores, las características del terreno suponen un factor a considerar. Muchos de los sistemas robóticos para ser aplicados en agricultura de exteriores se han basado en la ‘robotización’ de determinada maquinaria agrícola, incorporando los sensores necesarios para su navegación autónoma (los ya citados GPS, IMU, telemetría, etc.). Sin embargo, la tendencia actual apunta al desarrollo de ‘pequeños’ robots agrícolas, mas flexibles en cuanto a su cometido, con mejor capacidad de maniobra, robustez colectiva ante averías (el conjunto puede seguir operando aun si uno de ellos se detiene) y con un menor impacto en la compactación de terreno. Asimismo el acceso a cultivos de ladera o diferentes a praderas, es abordable con pequeños robots mejor que con máquina de medio o gran tamaño.
Sistemas de Manipulación: La manipulación, generalmente asociada al cosechado, tanto en invernadero, como en frutales, supone uno de los retos mas complejos por resolver, pues hay que combinar un agarre estable sobre objetos de geometría variable, con una adecuada velocidad que haga eficiente la automatización del proceso. Los avances que se están haciendo en el desarrollo de ‘soft robotics’ abren una nueva vía al considerar el uso de garras deformables de material no rígido, que pueden abrazar de manera delicada y firme a la vez frutos de diferentes formas. En todo caso este sigue siendo un tema abierto a la I+D.

Pequeños tractores robotizados. RHEA EU FP7. Fuente: CAR UPM-CISC.
Seguridad: Los espacios de trabajo donde los robots agrícolas actuales deben trabajar, son compartidos por operarios y en algunos casos por animales. Además el entorno no está exento de obstáculos, en ocasiones ocultos, que ponen en riesgo al robot. Por ello es preciso incorporar en el robot sistemas que detecten los riesgos (presencia de objetos estáticos o móviles) y los minimicen. Este objetivo es plenamente compartido por la robótica industrial actual, en la que se ha pasado de compartimentar los espacios de trabajo de operarios y máquinas a trabajar de manera simultánea y colaborativa sobre las mismas piezas, recurriendo para ello a la captación e interpretación del entorno mediante sensores de visión, fuerza y distancia y a algoritmos que reaccionan de manera rápida, pero no necesariamente enérgica, ante un contacto.
Aplicaciones de la robótica en la agricultura
Al ser la robótica agrícola una tecnología todavía en desarrollo, pueden considerarse multitud de aplicaciones potenciales. Sin embargo, hay algunas que, habiendo alcanzado un mayor grado de madurez, pueden ser descritas de una manera tangible y realista. Para hacer una rápida revisión de estas se van a estructurar en las que son propias de los robots aéreos y las que son desarrolladas por robots terrestres.
Robótica aérea: El uso de robots aéreos (conocidos como RPAS: Remoted Piloted Air Vehicles, UAV: Unmmaned Aerial Vehivcles o popularmente Drones) para fines civiles ha tenido una evolución tímida desde los años 90. Los riesgos asociados a los fallos o errores de funcionamiento y las altas exigencias de mantenimiento y formación han originado que, a pesar de evidenciarse sus interesantes aportaciones en diferentes campos, no haya sido hasta la última década cuando el desarrollo de los multirotores (de 4, 6 u 8 hélices) ha permitido la incorporación de manera intensa de esta tecnología en la agricultura. Son varias las tareas que la robótica aérea puede realizar en este sector, pero básicamente pueden ser agrupadas en 2 tipos: operaciones de captura de información y operaciones de aplicación de insumos. En el primer caso se incorpora a la plataforma aérea instrumentos de captura de información, en la mayor parte de los casos consistentes en cámaras en diferentes espectros, pero también puede considerarse la utilización de sensores de parámetros ambientales como humedad, temperatura, concentración de gases, etc.

Soft Gripper basada en el sistema Fin Ray de Festo. Fuente : http://www.crops-robots.eu.
Los robots, sobrevuelan la zona a explorar siguiendo un plan de vuelo en 2 dimensiones o, en ocasiones, en 3 dimensiones, a la vez que capturan la información que, una vez procesada, permite conocer las necesidades de nutrientes de una sola planta, el estado de irrigación del cultivo, la presencia de malas hierbas, cómo detectar fugas en el sistema de riego o estimar las dimensiones de los cultivos leñosos. El uso de robots aéreos para estas tareas, que alternativamente podrían ser realizadas por vuelos tripulados o por imágenes de satélite, presenta frente a estas opciones las ventajas de la gran disponibilidad temporal, la disminución de costes, el vuelo a baja altura y por ello gran resolución y la posibilidad de tomar datos tanto sobre grandes áreas, como sobre zonas específicas, si así se precisa. Otro área en la que la inmediatez y resolución que aportan los robots aéreos en la captura de información desde el aire es ventajosa es en la evaluación de daños tras desastre, para hacer la correcta tasación de los seguros de riesgo.

Robot aéreo dotado de cámara en espectro visible e infrarrojo. RHEA EU FP7. Fuente: CAR UPM-CISC.
Por otro lado, es posible utilizar estos robots aéreos para tareas de fumigación a baja altura, lo que de nuevo aporta las ventajas de la precisión y la focalización del tratamiento [7].
Robots terrestres: Como se ha comentado, los Vehículos Terrestres Autónomos (UGV) llevan aplicándose a la agricultura desde los años 90, basándose mayoritariamente en la ‘robotización’ de maquinaria agrícola convencional, abordando tareas de laboreo, fumigación y cosechado. Las nuevas tendencias apuntan a flotas de pequeños tractores robotizados o robots específicos que, adecuadamente coordinadas, pueden trabajar de manera ininterrumpida con mayor eficacia y robustez. Para ello, junto a los problemas de navegación, locomoción y otros ya comentados, se deben incorporar técnicas de comunicaciones y cooperación, que permitan pasar de un agregado de robots trabajando sobre el mismo espacio a un equipo bien integrado de robots (enjambres). Los principales fabricantes de maquinaria agrícola tienen prototipos en este sentido, pudiendo estar cerca su comercialización.
Para el caso de invernaderos, son muchos los desarrollos exitosos abordados por centros de investigación y empresas para tareas como la pulverización de fitosanitarios (Fitorobot de la Universidad de Almeria y Cadia [8]), la recolección de frutos (SW 6010 de Agrobot [9]) o la manipulación y gestión en semilleros (HV-100 de Harvest Automation).
Tecnologia Agricola
La agricultura y ganadería digital, los retos y nuevas tendencias en la tecnología agrícola o agropecuaria y su transferencia, la innovación en la industria agroalimentaria y las tecnologías de la información, la digitalización en los alimentos, están revolucionando la manera de gestionar las producciones agropecuarias.
Nace un nuevo modelo de procesos y organización de las pequeñas y medianas empresas del sector. Un rotundo giro del comportamiento de y hacia los consumidores.
El campo está conectado a la red. El sector agrícola y agroalimentario Español y de América Latina, es protagonista de una metamorfosis en la arquitectura interna de las empresas, de su agronegocio, en sus procesos y actividad comercial.
La revolución digital en la agricultura, ganadería, frutas y hortalizas, aceite de oliva, alimentos en general, está golpeando la puerta de las pymes ávido de entablar y mantener una conversación rentable.
Muchos son los objetivos de las aceleradoras, startup, empresas y profesionales que priorizan la creación de herramientas digitales cada vez más inteligentes, para seguir conectando el grano o suelo con un satélite o móvil.
Cada día surgen más objetivos en la digitalización de la agricultura, ganadería y sectores vinculantes. La conservación y gestión de los recursos naturales, técnicos o tecnológicos hasta los empresariales, la prevención de enfermedades y plagas de los cultivos, la protección de las cosechas y todos los factores o condicionantes de rendimiento, son foco de la investigación y desarrollo de nuevas tecnologías para hacer eficiente los procesos y gestión de todos los eslabones de las cadenas agroalimentarias y agrícolas.
¿Qué es la tecnología agrícola o agropecuaria? Definición, Significado y Concepto
La tecnología agrícola o agropecuaria es el conocimiento y la utilización de herramientas, técnicas, recursos, dispositivos y sistemas que permiten la utilización de elementos tecnológicos en las tareas y actividades agropecuarias.
La tecnología agrícola o agropecuaria está presente en todos los ámbitos de la vida cotidiana del campo. Aunque no nos demos cuenta, muchas actividades y labores que realizamos a lo largo de la jornada de trabajo implican la utilización de algún dispositivo tecnológico.
El desarrollo de la tecnología ha colaborado en derribar los muros de la comunicación y reducir la brecha entre el campo y su gente.
Solo hay que mirar alrededor y detectar que estamos rodeados de tecnología. Lo que antes nos llevaba horas conseguir o realizar, ahora es una cuestión de segundos. El mundo rural es cada vez más pequeño e hiperconectado. Las nuevas tendencias en tecnología agrícola van tomando forma.
La transferencia e importancia de la tecnología aplicada en la agricultura, ganadería y agronegocios.
La capacidad de asimilación de nuevas tecnologías aplicadas a la agricultura, ganadería y agronegocios es un proceso de incorporación lento en las pequeñas y medianas empresas agropecuarias.
Requiere de un cambio de paradigma interno de las pymes. De un nuevo modelo de agronegocio organizacional que busca la eficiencia, productividad y rentabilidad de los procesos y actividades en los 360º.
Hace más de 10 años, el agricultor o ganadero, profesional o estudiante de agronomía o veterinaria, tenían que esperar en una fila y pagar por fracciones de 15 minutos, en algún que otro bar, tienda o cibercafé, para poder hacer consultas en Internet.
En la actualidad, todo ha cambiado. El móvil cambio al agro. Es cotidiano visualizar a los intervinientes de las diferentes cadenas de la agroalimentación con su móvil en mano o equipados con iPads de última generación. Cabe aclarar que al día de hoy, la sensación de conducir una cosechadora, es de otro mundo.
Considero que el cambio a la agricultura digital es una cuestión cultural, de idiosincrasia. Existen nudos estructurales arraigados en las empresas y en las generaciones que giran en torno a la tecnología agrícola.
Hay un escalón en esta cadena que es el extensionismo, cuyo papel es clave y estratégico en la transferencia de tecnología aplicada a la agricultura, ganadería y agronegocios.
Las empresas que tienen éxito a corto plazo se diferencian por la gestión, innovación y la tecnología agrícola aplicada. En el enfoque y uso de las nuevas tendencias en tecnología agrícola.
Suscribirse a:
Comentarios (Atom)