El uso de robots en tareas agrícolas
Los robots son comúnmente utilizados en la manufactura de productos de alimentación, pero aún son poco frecuentes en el campo abierto o en los invernaderos, contribuyendo en el ciclo productivo agrícola. Sin embargo, la tecnología robótica aplicada al sector agrícola se encuentra en un estado de desarrollo avanzado, con algunas realizaciones ya plenamente comerciales y otras validadas a nivel de prototipo. La inminente necesidad de aumentar la producción sin aumentar los recursos y minimizando el impacto ambiental, demanda, tal vez de manera inexorable, dar el paso de la mecanización a la automatización de la agricultura, en donde la robótica agrícola tendrá un protagonismo destacado.
La automatización en general y la robótica en particular son tecnologías sólidamente establecidas en los sectores manufactureros, incluido la alimentación, donde aspectos como la higiene, la reducción de los costes de producción o el aumento de la productividad, entre otros, pueden verse beneficiados con el uso de robots que realizan de manera eficiente tareas de pick & place, empaquetado, clasificación etc.
Así, los datos recogidos por la Asociación Española de Robótica y Automatización [1] muestran que en el año 2014 el 17,7% de los robots industriales operativos en España, estaban dedicados al sector de alimentación y bebidas, porcentaje sólo superado por el sector automóvil con un 31,6% [2].
Pero si bien la robótica dedicada a la manufactura, denominada ‘robótica industrial’, es una tecnología altamente implantada desde los años 70, la denominada ‘robótica de servicios’ en la que se trabaja de manera intensa desde la década de los 80, tiene todavía muchas dificultades por resolver. Este tipo de robótica se caracteriza fundamentalmente por su objetivo que, en lugar de priorizar al aumento de la producción, se enfoca en ayudar o substituir al humano en el desarrollo de actividades donde existen riesgos o limitaciones físicas.
Casos paradigmáticos de la robótica de servicios en la actualidad pueden encontrarse en los robots quirúrgicos, donde ayudan a cirujanos en operaciones mínimamente invasivas o en los robots de exploración planetaria, donde los robots permiten la toma de datos en lugares donde, por las condiciones ambientales y la distancia, se hace en la práctica inviable la intervención directa de las personas.
Dentro de los robots de servicio, se incluyen los robots agrícolas, tanto para realizar labores en agricultura al aire libre como bajo cubierta, dándose en ambos casos, en mayor o menor grado, las dificultades asociadas a los entornos no estructurados y a la necesidad de compartir espacio con los trabajadores.
Si bien las investigaciones aplicadas sobre los robots agrícolas comenzaron hace mas de 25 años, ha sido recientemente cuando el desarrollo de diferentes ‘tecnologías facilitadoras’ asociadas a las TIC (Tecnologías de la Información y comunicaciones) ha permitido un progreso sustancial en sus desarrollos, consiguiendo en los últimos años que, de acuerdo a los datos recogidos por la International Federation of Robotics (www.ifr.org), las aplicaciones de la robótica en agricultura y ganadería sean las segundas en número de ventas de robots de servicios profesionales, tras las aplicaciones en defensa y seguridad.
¿Son necesarios los Robots Agrícolas?
¿Qué razones pueden justificar esta destacada posición de la robótica agrícola dentro de los robots de servicio? ¿Está justificada la robotización de la agricultura?
La reciente Expo Milano 2015 tuvo por lema ‘Feeding the Planet, Energy for Life’ (Alimentar el planeta, energía para la vida). En ella se recordó de nuevo la necesidad de aumentar la producción agrícola en un 60 o 70% antes del 2050 [3]. Sin embargo, los recursos naturales disponibles (suelo cultivable, agua, energía) se encuentran muy cerca de su límite. Por ello, se hace imprescindible, que a la vez que se aprovecha de la mejor manera posible lo producido, evitando su desperdicio, se mejore el rendimiento de los recursos, considerando éstos de manera integral.
La mecanización de la agricultura en el siglo XIX y la introducción del motor de combustión en el siglo XX, permitieron un aumento singular de la producción agrícola [4], a pesar de la fuerte disminución de la mano de obra dedicada a la agricultura [5], que ha tenido un fuerte declive, sobre todo durante la segunda mitad del siglo XX. No obstante, este aumento de la producción se ha realizado, en muchas ocasiones, con un notable derroche de los recursos, que no es sostenible en el tiempo.
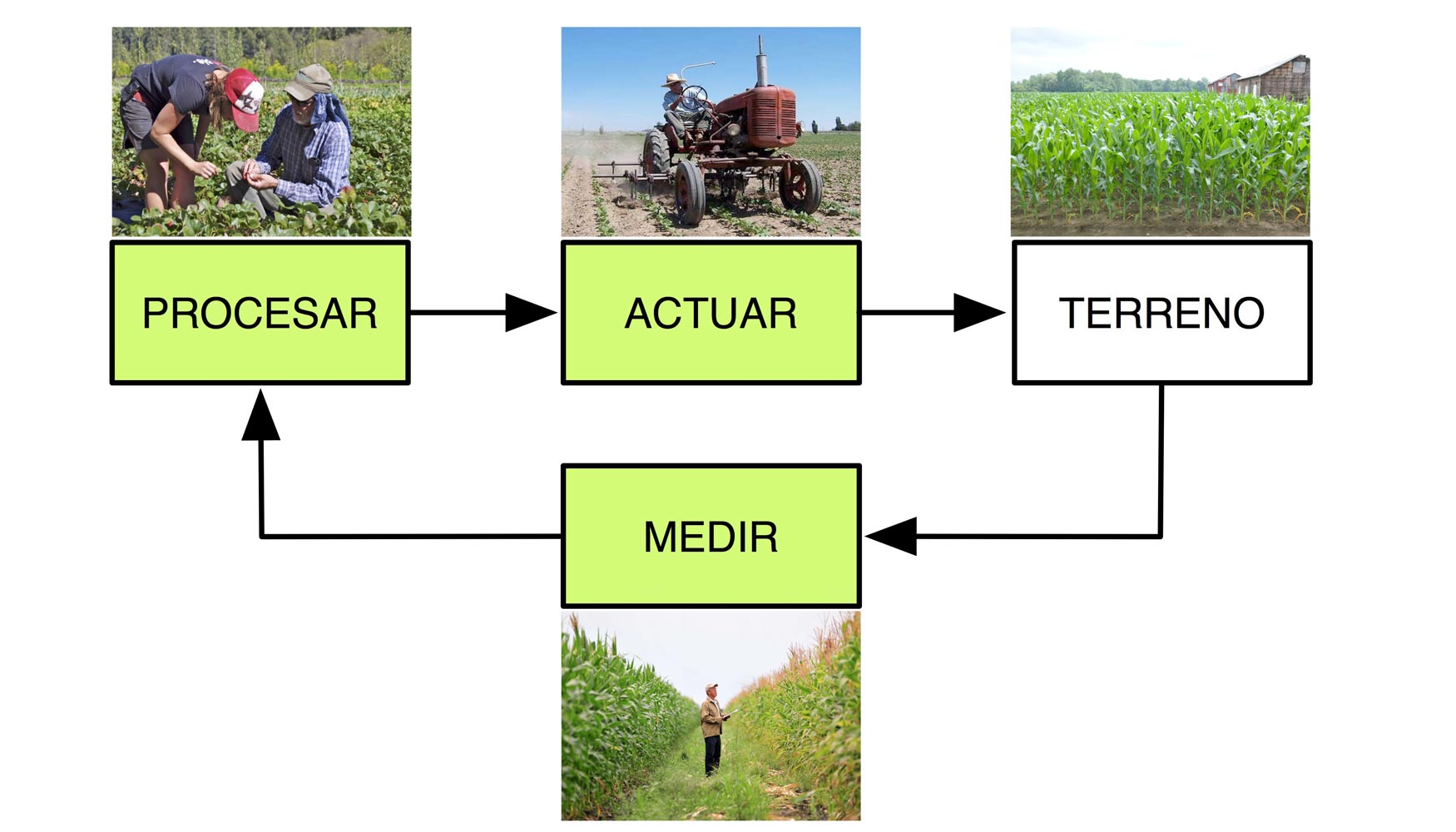
El ciclo de control.
La denominada Agricultura de Precisión contribuye específicamente a optimizar el uso de los recursos e insumos. Su filosofía se sintetiza en utilizar el recurso adecuado en el lugar y momento preciso, evitando de este modo aplicar, por ejemplo, un riego o producto fitosanitario en una dosis excesiva o en un lugar innecesario. Para ello utiliza una metodología similar a la utilizada frecuentemente por los seres vivos y que, a su vez, inspira el funcionamiento de los sistemas automáticos de control industrial: Medir, Procesar la información y Actuar, reiterando este proceso de manera continua, para así conseguir que los resultados se acerquen a los objetivos.
La eficacia de este modo de funcionamiento precisa conocer con detalle espacial y temporal las necesidades de los cultivos y poder actuar con la misma resolución espacio temporal de manera adecuada. Estas funciones, que a pequeña escala pueden ser realizadas de manera manual, precisan de sistemas automáticos para poder ser proyectadas a las escalas de producción que la demanda precisa. Es aquí donde los robots agrícolas, entendidos como maquinaria con capacidad de desenvolverse en el entorno agrícola para capturar información o actuar sobre el terreno de manera autónoma o semiautónoma, encuentran su justificación.
Retos tecnológicos en la robótica agrícola
La robótica agrícola está, a día de hoy, en fase de prototipo avanzado, en lo que se viene a denominar nivel 7 de madurez tecnológica [6], lo que equivale a capacidad de demostración de sistema o prototipo en un entorno real, por lo que, salvo algunas excepciones, aún no alcanza la madurez necesaria como para abordar su implantación real y extendida en el sector. Además de motivos económicos, que enfrentan el alto coste de parte de la tecnología utilizada con los costes de la mano de obra dedicada a las actividades agrícola, las dificultades tecnológicas derivadas principalmente de la falta de estructuración del entorno de trabajo, suponen un complejo reto a superar. A continuación se revisan algunas de las tecnologías críticas en el desarrollo de la robótica agrícola.
Sistemas de Navegación: Puesto que se trata medir o actuar sobre localizaciones precisas, la primera necesidad a ser cubierta por un robot que se mueve en un entorno agrícola es la de navegación. Aquí es significativamente diferente la tecnología a utilizar en el caso de agricultura de interiores o exteriores. Así, en el caso de robots para invernadero, puede contemplarse desde el uso de robots que se desplazan por railes, facilitando enormemente su localización, hasta la inclusión de marcas o balizas en el entorno (ópticas, RFID, etc.), que pueden simplificar la tareas de localización del robot. Por el contrario, no se puede considerar el uso de los sistemas de navegación por satélite, como el conocido GPS, o el futuro sistema Galileo, que si puede formar parte destacable, pero normalmente insuficiente por si sola, del sistema de navegación de los robots agrícolas de exteriores.
En ambos casos la navegación del robot suele verse apoyada por sistemas de medida inercial (IMU) y por sistemas de telemetría que, con los correspondientes algoritmos, consiguen precisiones suficientes para el posicionamiento del robot. Toda esta tecnología está implantada en otros sectores y en fuerte proceso de mejora y crecimiento.
Sistemas de Visión por Computador: La visión por computador 2D y 3D, tanto en espectro visible como en otros espectros, constituye un pilar fundamental en el uso de robots en agricultura, tanto para las tareas de captura de información que, adecuadamente procesada, permite la toma de decisiones (estado vegetativo, necesidades hídricas o de nutrientes, presencia de plagas, etc.), como para ser usado como instrumento de ayuda al posicionamiento que permite ubicar la posición relativa entre el robot y el entorno sobre el que debe actuar (cosechado, localización de maleza, seguimiento de línea de cultivo, etc.). Las oclusiones entre los objetos sobre los que actuar, como por ejemplo frutos dentro de la masa foliar, la falta de homogeneidad y por ello difícil clasificación de los objetos presentes en la imagen y la variabilidad de las condiciones de iluminación, suponen una notable dificultad que limita aún las posibilidades de los robots tanto en exteriores como en interiores.

Procesamiento de imagen de frutos. CROpS. EU FP7 Project. Fuente: (http://www.crops-robots.eu).
Plataformas: Mientras que en el caso de robots de interiores las plataformas que transportan y posicionan los sistemas de medida o actuación son similares a las utilizadas en otras aplicaciones (transporte en almacén, vigilancia etc.) en el caso de robots de exteriores, las características del terreno suponen un factor a considerar. Muchos de los sistemas robóticos para ser aplicados en agricultura de exteriores se han basado en la ‘robotización’ de determinada maquinaria agrícola, incorporando los sensores necesarios para su navegación autónoma (los ya citados GPS, IMU, telemetría, etc.). Sin embargo, la tendencia actual apunta al desarrollo de ‘pequeños’ robots agrícolas, mas flexibles en cuanto a su cometido, con mejor capacidad de maniobra, robustez colectiva ante averías (el conjunto puede seguir operando aun si uno de ellos se detiene) y con un menor impacto en la compactación de terreno. Asimismo el acceso a cultivos de ladera o diferentes a praderas, es abordable con pequeños robots mejor que con máquina de medio o gran tamaño.
Sistemas de Manipulación: La manipulación, generalmente asociada al cosechado, tanto en invernadero, como en frutales, supone uno de los retos mas complejos por resolver, pues hay que combinar un agarre estable sobre objetos de geometría variable, con una adecuada velocidad que haga eficiente la automatización del proceso. Los avances que se están haciendo en el desarrollo de ‘soft robotics’ abren una nueva vía al considerar el uso de garras deformables de material no rígido, que pueden abrazar de manera delicada y firme a la vez frutos de diferentes formas. En todo caso este sigue siendo un tema abierto a la I+D.

Pequeños tractores robotizados. RHEA EU FP7. Fuente: CAR UPM-CISC.
Seguridad: Los espacios de trabajo donde los robots agrícolas actuales deben trabajar, son compartidos por operarios y en algunos casos por animales. Además el entorno no está exento de obstáculos, en ocasiones ocultos, que ponen en riesgo al robot. Por ello es preciso incorporar en el robot sistemas que detecten los riesgos (presencia de objetos estáticos o móviles) y los minimicen. Este objetivo es plenamente compartido por la robótica industrial actual, en la que se ha pasado de compartimentar los espacios de trabajo de operarios y máquinas a trabajar de manera simultánea y colaborativa sobre las mismas piezas, recurriendo para ello a la captación e interpretación del entorno mediante sensores de visión, fuerza y distancia y a algoritmos que reaccionan de manera rápida, pero no necesariamente enérgica, ante un contacto.
Aplicaciones de la robótica en la agricultura
Al ser la robótica agrícola una tecnología todavía en desarrollo, pueden considerarse multitud de aplicaciones potenciales. Sin embargo, hay algunas que, habiendo alcanzado un mayor grado de madurez, pueden ser descritas de una manera tangible y realista. Para hacer una rápida revisión de estas se van a estructurar en las que son propias de los robots aéreos y las que son desarrolladas por robots terrestres.
Robótica aérea: El uso de robots aéreos (conocidos como RPAS: Remoted Piloted Air Vehicles, UAV: Unmmaned Aerial Vehivcles o popularmente Drones) para fines civiles ha tenido una evolución tímida desde los años 90. Los riesgos asociados a los fallos o errores de funcionamiento y las altas exigencias de mantenimiento y formación han originado que, a pesar de evidenciarse sus interesantes aportaciones en diferentes campos, no haya sido hasta la última década cuando el desarrollo de los multirotores (de 4, 6 u 8 hélices) ha permitido la incorporación de manera intensa de esta tecnología en la agricultura. Son varias las tareas que la robótica aérea puede realizar en este sector, pero básicamente pueden ser agrupadas en 2 tipos: operaciones de captura de información y operaciones de aplicación de insumos. En el primer caso se incorpora a la plataforma aérea instrumentos de captura de información, en la mayor parte de los casos consistentes en cámaras en diferentes espectros, pero también puede considerarse la utilización de sensores de parámetros ambientales como humedad, temperatura, concentración de gases, etc.

Soft Gripper basada en el sistema Fin Ray de Festo. Fuente : http://www.crops-robots.eu.
Los robots, sobrevuelan la zona a explorar siguiendo un plan de vuelo en 2 dimensiones o, en ocasiones, en 3 dimensiones, a la vez que capturan la información que, una vez procesada, permite conocer las necesidades de nutrientes de una sola planta, el estado de irrigación del cultivo, la presencia de malas hierbas, cómo detectar fugas en el sistema de riego o estimar las dimensiones de los cultivos leñosos. El uso de robots aéreos para estas tareas, que alternativamente podrían ser realizadas por vuelos tripulados o por imágenes de satélite, presenta frente a estas opciones las ventajas de la gran disponibilidad temporal, la disminución de costes, el vuelo a baja altura y por ello gran resolución y la posibilidad de tomar datos tanto sobre grandes áreas, como sobre zonas específicas, si así se precisa. Otro área en la que la inmediatez y resolución que aportan los robots aéreos en la captura de información desde el aire es ventajosa es en la evaluación de daños tras desastre, para hacer la correcta tasación de los seguros de riesgo.

Robot aéreo dotado de cámara en espectro visible e infrarrojo. RHEA EU FP7. Fuente: CAR UPM-CISC.
Por otro lado, es posible utilizar estos robots aéreos para tareas de fumigación a baja altura, lo que de nuevo aporta las ventajas de la precisión y la focalización del tratamiento [7].
Robots terrestres: Como se ha comentado, los Vehículos Terrestres Autónomos (UGV) llevan aplicándose a la agricultura desde los años 90, basándose mayoritariamente en la ‘robotización’ de maquinaria agrícola convencional, abordando tareas de laboreo, fumigación y cosechado. Las nuevas tendencias apuntan a flotas de pequeños tractores robotizados o robots específicos que, adecuadamente coordinadas, pueden trabajar de manera ininterrumpida con mayor eficacia y robustez. Para ello, junto a los problemas de navegación, locomoción y otros ya comentados, se deben incorporar técnicas de comunicaciones y cooperación, que permitan pasar de un agregado de robots trabajando sobre el mismo espacio a un equipo bien integrado de robots (enjambres). Los principales fabricantes de maquinaria agrícola tienen prototipos en este sentido, pudiendo estar cerca su comercialización.
Para el caso de invernaderos, son muchos los desarrollos exitosos abordados por centros de investigación y empresas para tareas como la pulverización de fitosanitarios (Fitorobot de la Universidad de Almeria y Cadia [8]), la recolección de frutos (SW 6010 de Agrobot [9]) o la manipulación y gestión en semilleros (HV-100 de Harvest Automation).

No hay comentarios:
Publicar un comentario